GPIO使用
本节介绍
📝本节您将了解 GPIO 的概念,并且了解开发板的 LED 硬件电路,学习如何使用图形化代码生成工具CubeMX,让开发板上的LED灯进行闪烁。
1️⃣了解 GPIO 的概念。 2️⃣了解主控 STM32F411 的 GPIO 硬件特性和 GPIO 结构。 3️⃣了解开发板上的 LED 硬件电路。 4️⃣使用图形化工具通过 GPIO 外设,控制 LED 灯闪烁。
GPIO 的基本概念
什么是 GPIO
GPIO,全称为 「General-Purpose Input/Output」,即通用输入 / 输出端口。
它是微控制器、微处理器和某些其他集成电路上的一个引脚,可以由软件控制其输入或输出状态。
GPIO 为开发者提供了一种简单、灵活的方式来控制硬件设备或与外部设备进行通信。
GPIO 的输入 / 输出
当 GPIO 引脚被配置为输入模式时,它可以读取外部信号的状态,通常是高电平或低电平。 这种模式常用于以下场景: 📌 读取开关/按钮状态:例如,检测一个按钮是否被按下。 📌 接收信号:从其他设备(如传感器、其他微控制器)接收数字信号。 📌 中断触发:配置为输入的 GPIO 引脚可以用于触发中断,响应外部事件。 需要注意,在输入模式下,GPIO 引脚通常具有高阻态,以防止对连接的设备造成影响。
当 GPIO引 脚被配置为输出模式时,它可以输出高电平或低电平,用于控制外部设备。 这种模式常用于以下场景: 📌 驱动LED:通过输出高电平或低电平来控制LED的亮灭。 📌 控制继电器:通过输出信号来控制继电器的开关。 📌 通信:在诸如I2C、SPI等通信协议中,GPIO引脚用于输出时钟信号或数据。 需要注意,在输出模式下,GPIO 引脚只能提供一些驱动能力,以驱动外部负载。需要大电流的时候使用 GPIO 输出是无法驱动的。 通常 GPIO 的输出电流只有为 20mA 左右
高电平与低电平
高电平与低电平是数字电路中的基本概念,用于表示电路中的两种不同的电压状态,这两种状态通常用于表示二进制数据中的 1 和 0 。
📌 定义:在数字电路中,高电平通常表示一种较高的电压状态。 📌 电压范围:具体的电压范围取决于所使用的逻辑电路标准。在 STM32F411 中,IO 电平是3.3V。 📌 表示:在数字逻辑中,高电平通常表示 “1” 或 “真(True)” 状态。
📌 定义:与高电平相对,低电平表示一种较低的电压状态。 📌 电压范围:同样,具体的电压范围取决于逻辑电路标准。在 STM32F411 中,低电平是接近 地 电位的值(如 0 V)。 📌 表示:在数字逻辑中,低电平通常表示 “0” 或 “假(false)” 状态。
注意!不同的电子设备可能使用不同的电平标准,因此在连接不同设备时需要确保电平兼容。比如芯片的 IO 是 3.3V,当它需要接入到 5V 的传感器时,就需要考虑电平兼容问题。不过这个问题在STM32上基本被解决了,大部分的 IO 是兼容 5V 的。
 |
|---|
主控的 GPIO 硬件特性
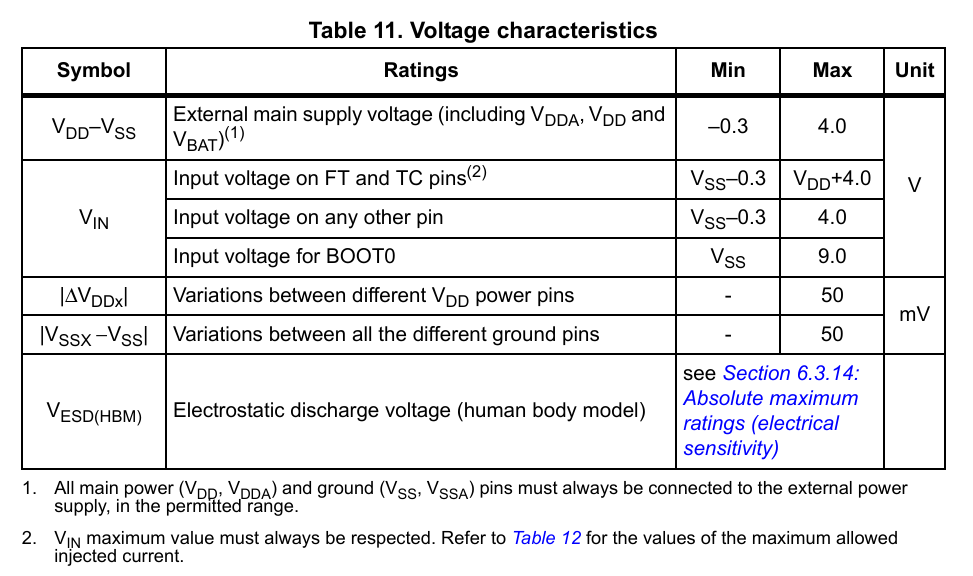
绝对最大额定值
 |
|---|
 |
|---|
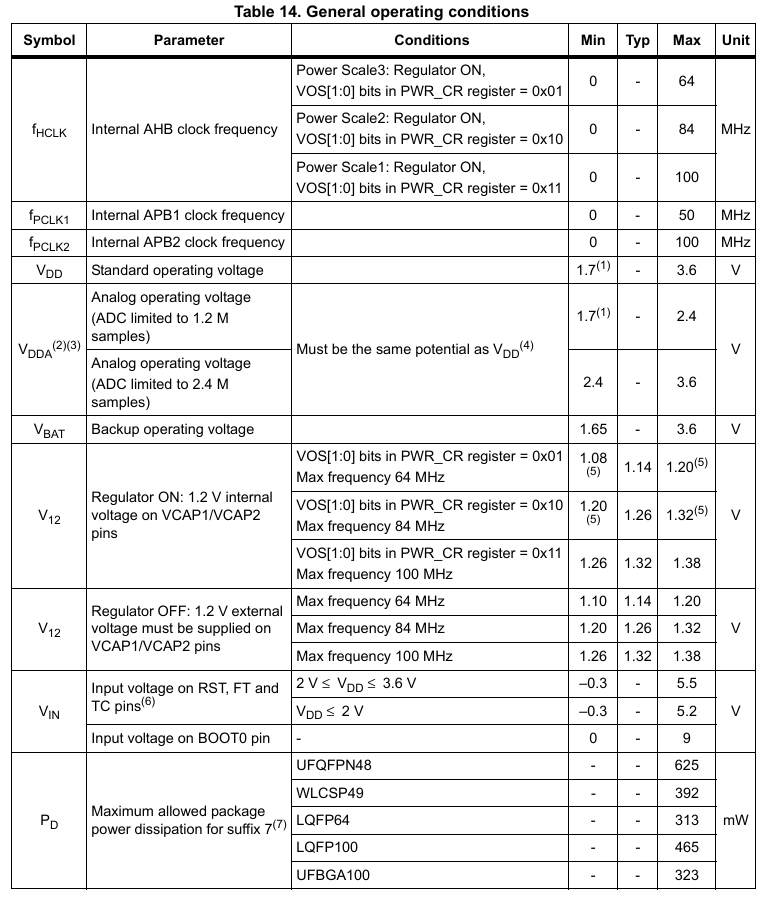
建议运行条件
 |
|---|
GPIO电源特性总结
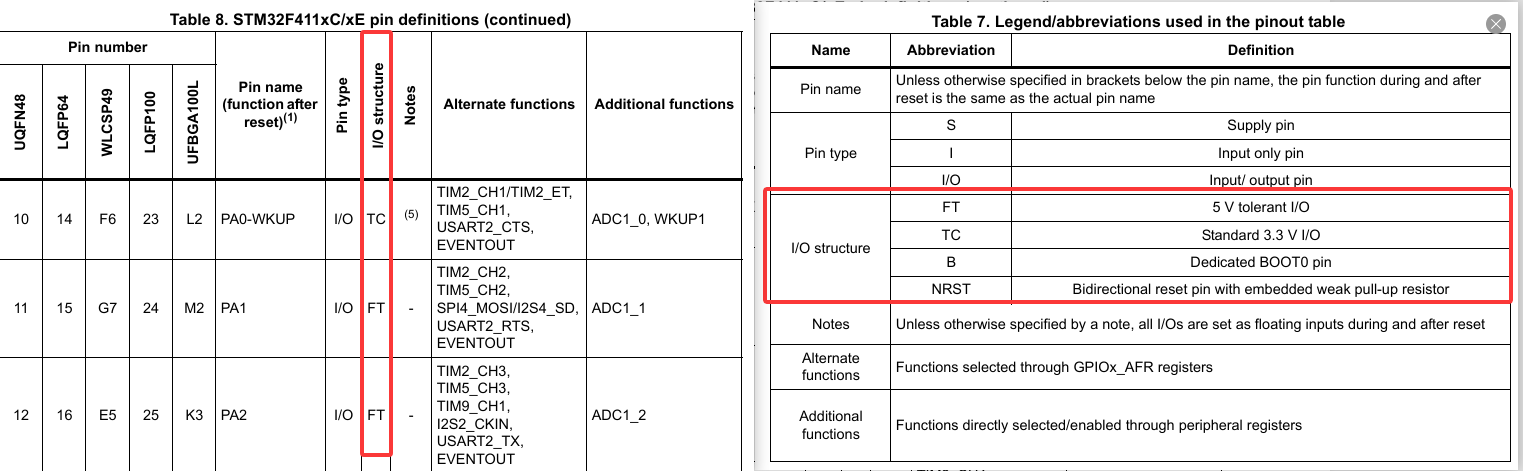
芯片标准工作电压 1.7~3.6V,最大输入 4V。除 PA0 \ PB5 \ PA4 \ PA5 是标准的 3.3V 的引脚外,其他的 GPIO 都是兼容 5V 电压,最高输入 5.5V。
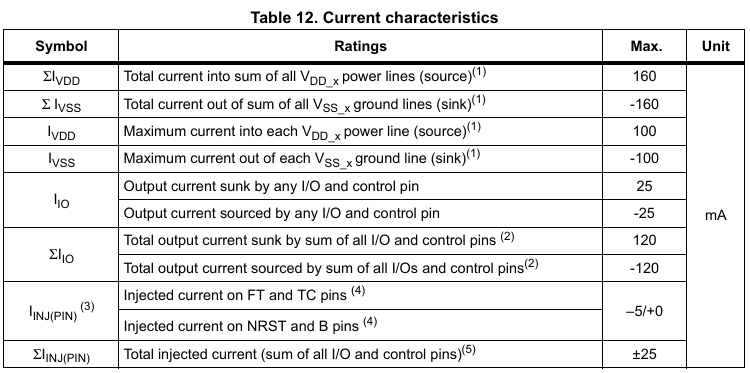
单 GPIO 口的输出电流为 25 mA,全部 GPIO 的输出电流最大 120 mA。
单 GPIO 口的输入电流为 5 mA,全部 GPIO 的输入电流最大 25 mA。
GPIO 结构介绍
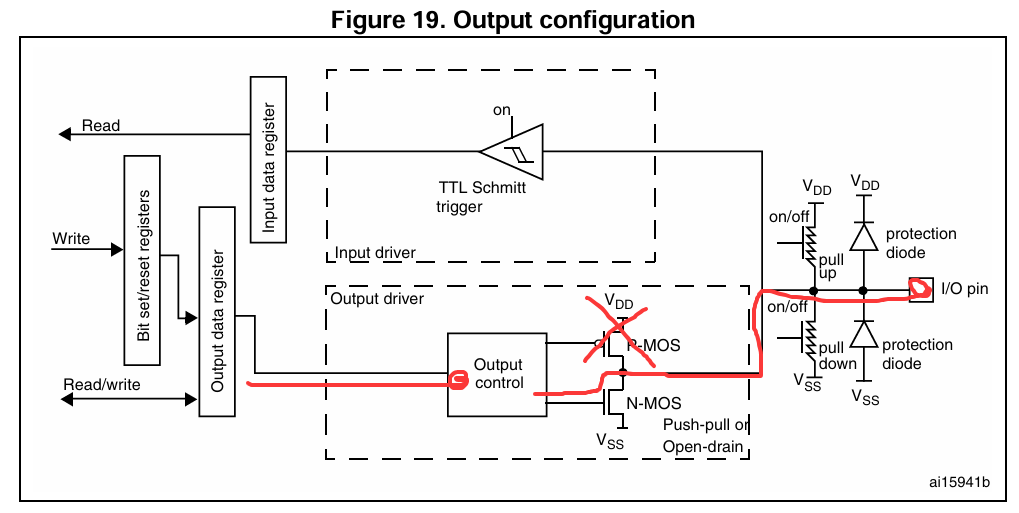
输出模式
输出模式有两种结构。
既能输出低电平,也能输出高电平。
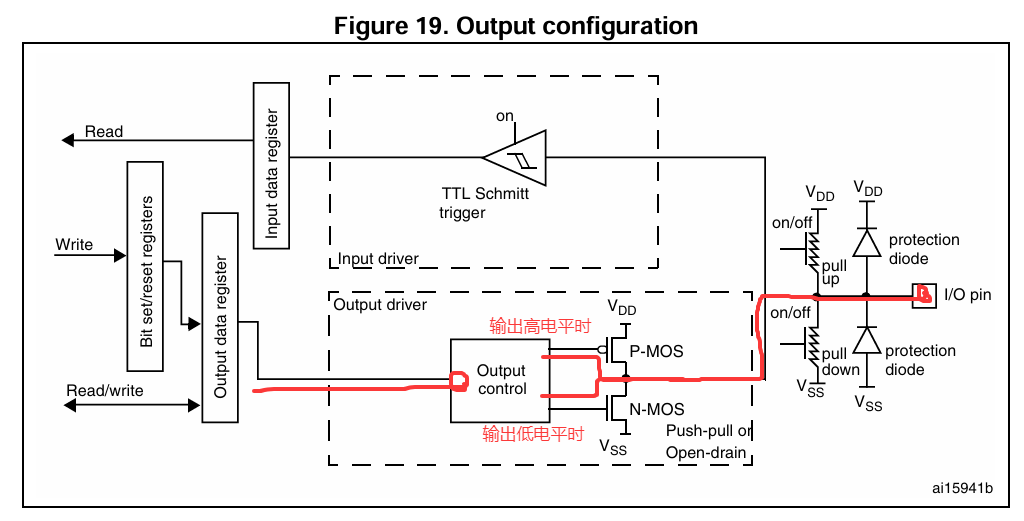
只能输出低电平,不能输出高电平。
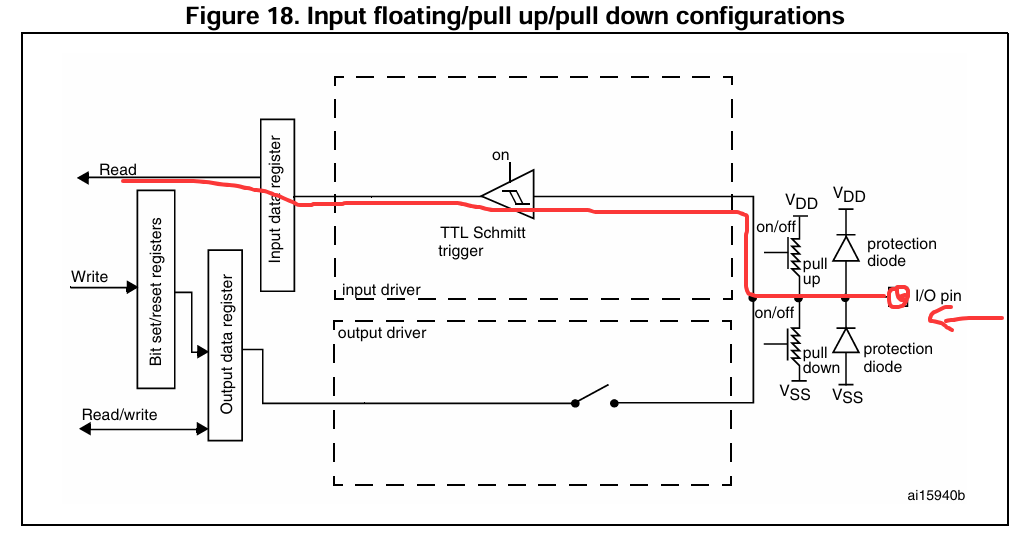
输入模式
通过引脚输入的模拟电压信号,经过一个 TTL 施密特触发器后,转化为一个 TTL 电平(即只有高电平和低电平的区别),然后进入到寄存器中。
 |
|---|
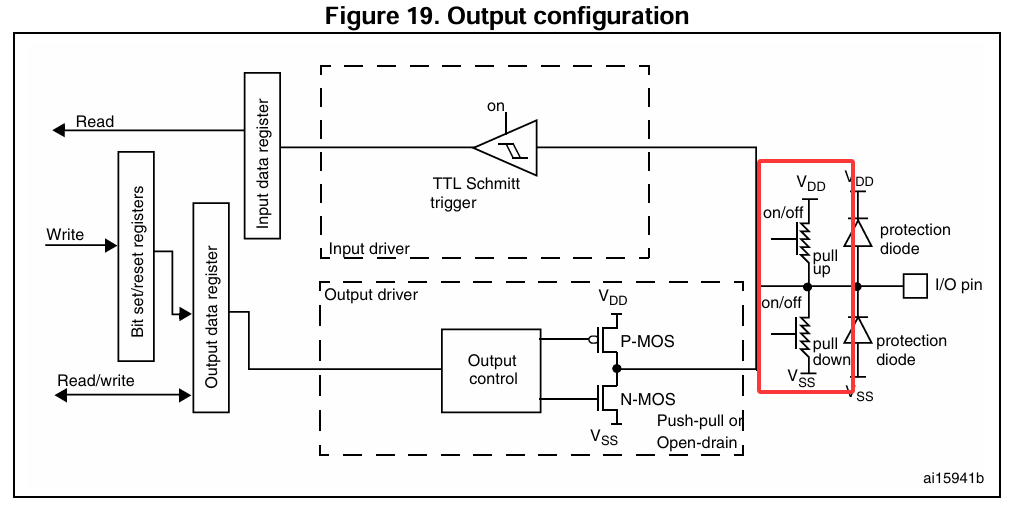
浮空与上下拉电阻
通过配置上拉电阻(pull up)和下拉电阻(pull down)实现让引脚默认为高电平还是低电平。
浮空就是既不配置上拉也不配置下拉,这个时候除非接入有信号,不然输入值是不确定的。
 |
|---|
LED 电路介绍
LED 灯发光原理
LED(发光二极管)发光原理基于半导体特性。在半导体中,存在着两类载流子:电子(n型半导体)和空穴(p型半导体)。当n型与p型半导体材料接触时,会在交界处形成一个层结。当施加适当的电压时,层结中空穴和电子可重组并释放能量。这个能量以光子的形式释放出来,产生光。
LED 灯驱动原理
LED 驱动指的是通过稳定的电源为 LED 提供合适的电流和电压,使其正常工作点亮。LED 驱动方式主要有恒流和恒压两种。限定电流的恒流驱动是最常见的方式,因为 LED 灯对电流敏感,电流大于其额定值可能导致损坏。恒流驱动保证了稳定的电流,从而确保了 LED 安全。
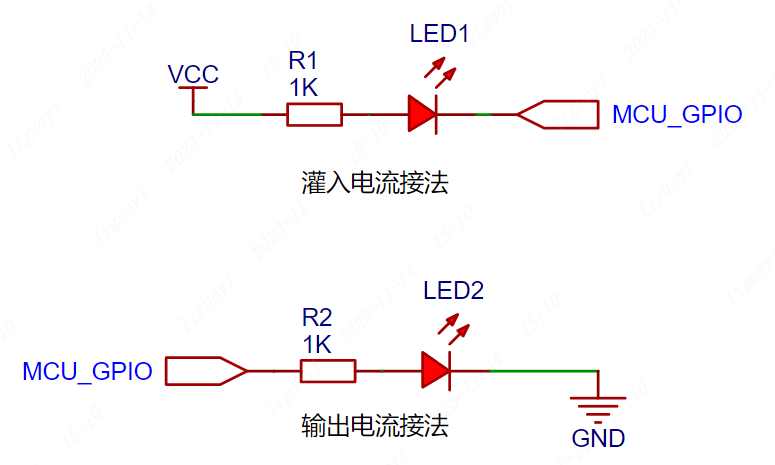
不过,在单片机上,想用GPIO控制LED的亮灭,也分有两种:灌入电流和输出电流。
 |
|---|
灌入电流指的是LED的供电电流是由外部提供电流,将电流灌入我们的MCU;风险是当外部电源出现变化时,会导致MCU的引脚烧坏。输出电流指的是由MCU提供电压电流,将电流输出给LED;如果使用 MCU 的 GPIO 直接驱动 LED,则驱动能力较弱,可能无法提供足够的电流驱动 LED。
需要注意的 是 LED 灯的颜色不同,对应的电压压降也不同。电流不可过大,通常需要接入220欧姆到10K欧姆左右的限流电阻,限流电阻的阻值越大,LED的亮度越暗。
板载 LED 电路解析
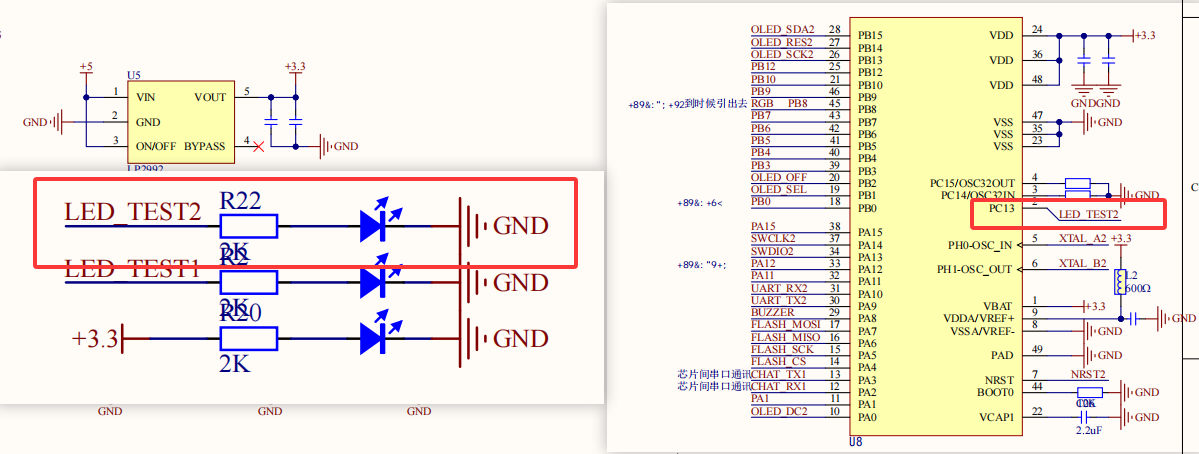
在开发板上,有一个 LED灯 接到了开发板 F411 主控的 PC13 引脚,采用的接法是输出电流接法。
 |
|---|
其中,R22 为 LED 灯的限流电阻,限流电阻通常跟 LED 搭配,防止 LED 灯电路上的电流过大,导致 LED 灯烧毁。因为 LED 灯本质上就是一个二极管,而二极管导通时相当于是一根导线,如果一端接3V3一端接GND,根据简单的欧姆定律就可以知道电流会非常大,就短路了。
限流电阻使用的是 2K 阻值,可以根据欧姆定律就可以计算出该 LED 灯电路需要的电流为:
该输出电流对于我们单个 GPIO 最大输出电流 25mA 来说,绰绰有余。
点亮 LED 就要让这个 LED 发光二极管导通,导通就需要正极高电平,负极低电平,符合这个条件时,LED 就有电流流过,而有了电流,LED 灯就会发光。而这里采用的是输出电流接法。 那么如果要点亮 LED,则控制 PC13 引脚输出高电平;如果要熄灭 LED,则控制 PC13 引脚输出低电平;
案例工程创建
目标:配置 PC13 引脚为推挽输出模式,控制该引脚以一定的时间间隔切换高电平和低电平状态,让 PC13 引脚上的 LED 灯实现闪烁效果。
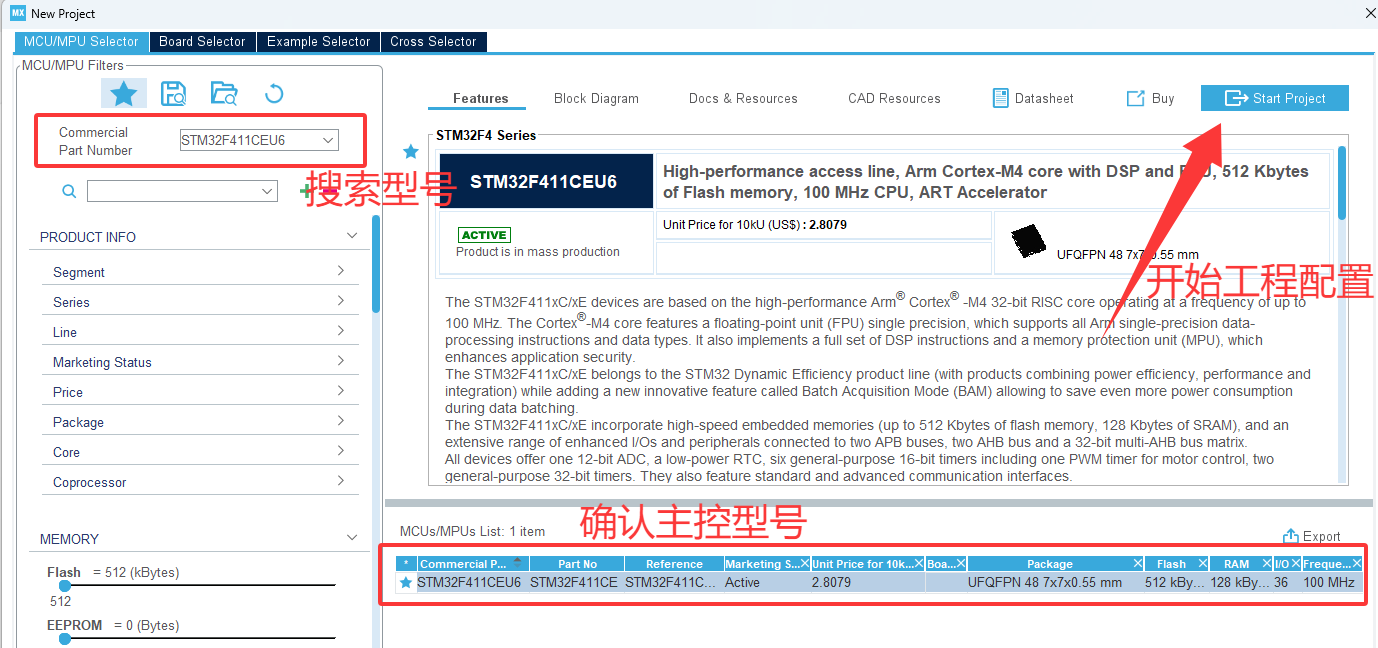
打开 CubeMX,创建一个名为 02_gpio 的工程。
 |
|---|
 |
|---|
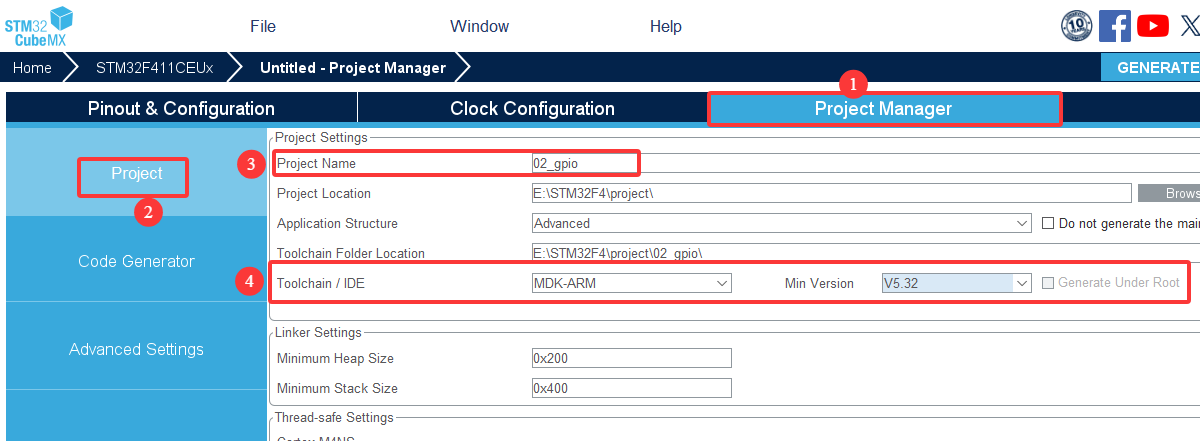
工程基本配置说明:
- 选择 Project Manager 选项
- 选择 Project 配置
- 设置工程名称为 02_gpio
- 设置开发环境为 MDK-ARM,以及目前的最小版本
 |
|---|
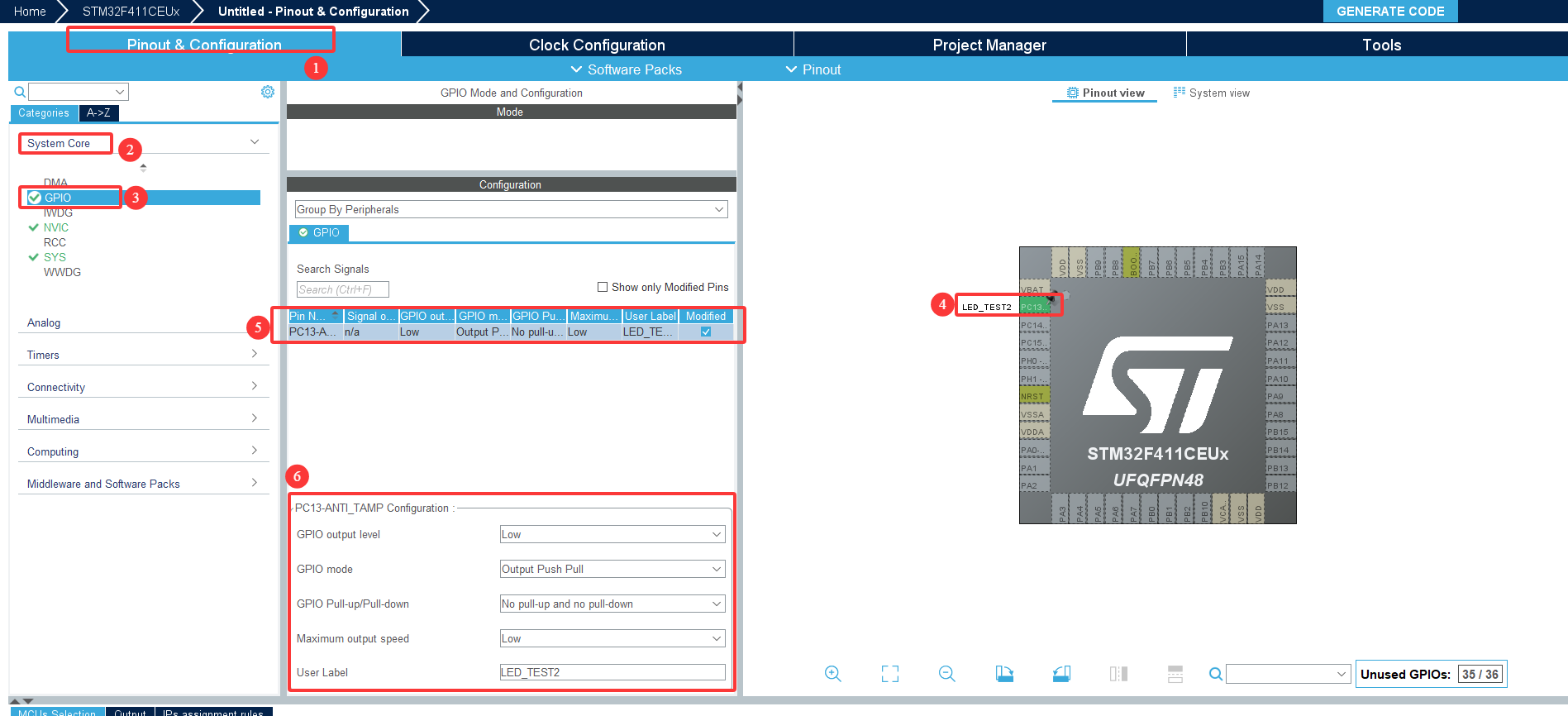
工程 GPIO 配置说明:
- 选择 Pinout & Configuration 选项
- 选择 SyStem Core 配置
- 在 SyStem Core 配置下,打开 GPIO 配置页
- 在右侧芯片引脚分布图中找到或者搜索 PC13 引脚,左键配置为 GPIO_Output 模式
- 选中我们刚才配置的 PC13 引脚
- 配置 PC13 引脚为默认低电平输出、推挽输出模式、浮空状态、低速翻转速度、自定义名称为 LED_TEST2
| 配置选项 | 选项说明 | 可选参数 |
|---|---|---|
| GPIO output level | 配置 GPIO 的默认输出电平 | 低电平 Low 高电平 High |
| GPIO mode | 配置 GPIO 模式 | 推挽输出 Output Push Pull 开漏输出 Output Open Drain |
| GPIO Pull-up/Pull-down | 配置上下拉电阻 | 浮空No pull-up and no pull-down 上拉Pull-up |
| Maximum output speed | 配置最大翻转速度 | 低速Low[1] |
| User Label | 用户给该引脚一个自定义的标签方便辨识 | 自定义 |
有部分引脚支持高速,这里 PC13 只支持低速。
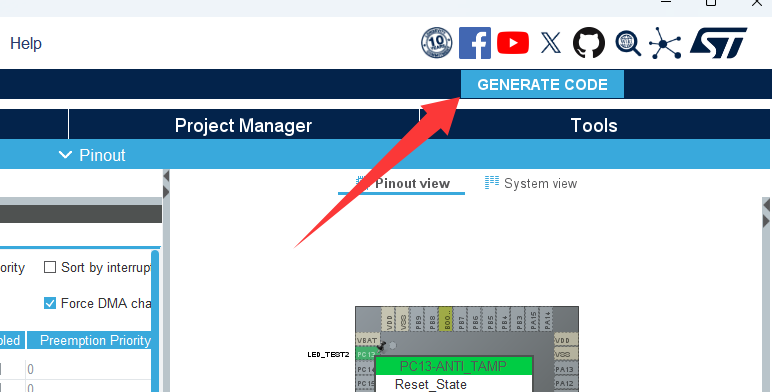
开始生成工程代码。
 |
|---|
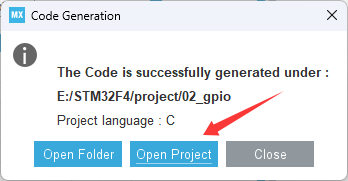
生成完毕后,直接打开工程。
 |
 |
|---|---|
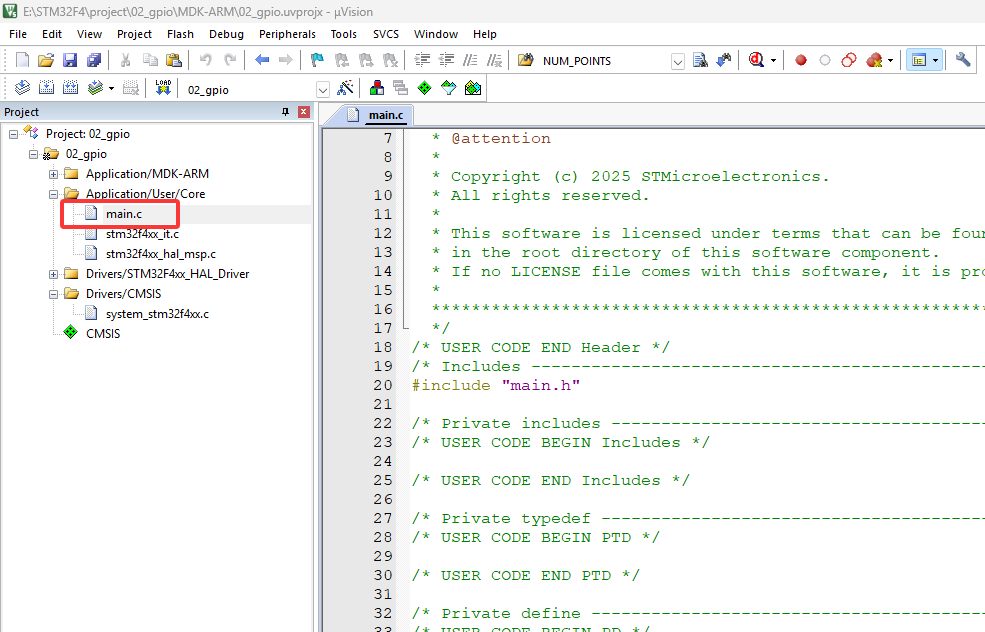
工程代码编写
生成代码分析
在生成的工程代码中,我们可以在 main.c 找到关于 GPIO 的配置:
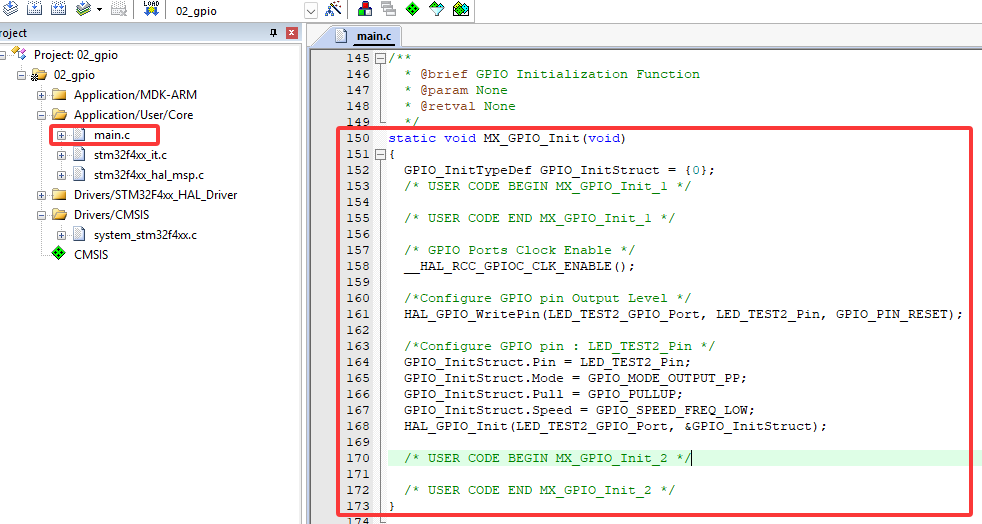
关于 GPIO 的配置流程总结如下:
开启对应 GPIO 组的时钟
__HAL_RCC_GPIOC_CLK_ENABLE();配置 GPIO 的基本信息:
/*Configure GPIO pin Output Level */ /* 设置标签为 LED_TEST2 的引脚,输出低电平 */ HAL_GPIO_WritePin(LED_TEST2_GPIO_Port, LED_TEST2_Pin, GPIO_PIN_RESET); /*Configure GPIO pin : LED_TEST2_Pin */ GPIO_InitStruct.Pin = LED_TEST2_Pin; // 配置 LED_TEST2 这个标签的引脚 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 配置为推挽输出模式 GPIO_InitStruct.Pull = GPIO_NOPULL; // 配置浮空 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;// 配置低速翻转速度 //将以上配置写入到 GPIO 寄存器中 HAL_GPIO_Init(LED_TEST2_GPIO_Port, &GPIO_InitStruct);
总结:
- 如果没有 CubeMX 图形化工具,那么以上代码都要我们手撸,很麻烦。
- 时钟对于外设来说就是生命,没有开启时钟,外设就无法启动。
常用功能函数总结
我们现在通过 CubeMX 生成了一个 PC13 默认为低电平的输出模式,那么我们要怎么让 PC13 引脚一会高电平一会低电平呢?
来认识一下下面这些常用API函数:
/**
* @brief 根据 GPIO_Init 中的指定参数初始化 GPIOx 外设
* @param GPIOx 其中 x 可以是 (A..K) 用于选择 STM32F429X 设备的 GPIO 外设,
* 或 x 可以是 (A..I) 用于选择 STM32F40XX 和 STM32F427X 设备的 GPIO 外设。
* @param GPIO_Init 指向 GPIO_InitTypeDef 结构体的指针,该结构体包含
* 指定 GPIO 外设的配置信息。
* @retval 无
*/
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
/**
* @brief 将 GPIOx 外设寄存器反初始化为默认复位值
* @param GPIOx 其中 x 可以是 (A..K) 用于选择 STM32F429X 设备的 GPIO 外设,
* 或 x 可以是 (A..I) 用于选择 STM32F40XX 和 STM32F427X 设备的 GPIO 外设。
* @param GPIO_Pin 指定要操作的端口引脚
* 此参数可以是 GPIO_PIN_x,其中 x 范围为 (0..15)
* @retval 无
*/
void HAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin)
/**
* @brief 读取指定的输入端口引脚状态
* @param GPIOx 其中 x 可以是 (A..K) 用于选择 STM32F429X 设备的 GPIO 外设,
* 或 x 可以是 (A..I) 用于选择 STM32F40XX 和 STM32F427X 设备的 GPIO 外设。
* @param GPIO_Pin 指定要读取的端口引脚
* 此参数可以是 GPIO_PIN_x,其中 x 范围为 (0..15)
* @retval 输入端口引脚的值
*/
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
/**
* @brief 设置或清除选定的数据端口位
*
* @note 此函数使用 GPIOx_BSRR 寄存器实现原子读/修改访问,
* 这种方式可确保在读取和修改访问之间不会发生 IRQ 中断风险
*
* @param GPIOx 其中 x 可以是 (A..K) 用于选择 STM32F429X 设备的 GPIO 外设,
* 或 x 可以是 (A..I) 用于选择 STM32F40XX 和 STM32F427X 设备的 GPIO 外设。
* @param GPIO_Pin 指定要操作的端口引脚
* 此参数可以是 GPIO_PIN_x,其中 x 范围为 (0..15)
* @param PinState 指定要写入选定位的值
* 此参数可以是 GPIO_PinState 枚举值之一:
* @arg GPIO_PIN_RESET: 清除端口引脚
* @arg GPIO_PIN_SET: 置位端口引脚
* @retval 无
*/
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
/**
* @brief 切换指定的 GPIO 引脚状态
* @param GPIOx 其中 x 可以是 (A..K) 用于选择 STM32F429X 设备的 GPIO 外设,
* 或 x 可以是 (A..I) 用于选择 STM32F40XX 和 STM32F427X 设备的 GPIO 外设。
* @param GPIO_Pin 指定要切换的引脚
* @retval 无
*/
void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
以上代码为工程中的 stm32f4xx_hal_gpio.c 文件中的内容经过中文翻译后的结果。
我们来举一个例子,假设我要读取 PA0 的电平,如果是高电平则让 PC13 输出低电平,如果是低电平则让 PC13 输出高电平。
根据以上的常用功能函数总结,可以这样写:
/*
读取 PA0 的电平,如果是高电平则让 PC13 输出低电平,如果是低电平则让 PC13 输出高电平。
*/
//如果PA0为高电平
if( HAL_GPIO_ReadPin( GPIOA, GPIO_PIN_0 ) == GPIO_PIN_SET )
{
//PC13输出低电平
HAL_GPIO_WritePin( GPIOC, GPIO_PIN_13, GPIO_PIN_RESET );
}
//否则如果PA0为低电平
else if( HAL_GPIO_ReadPin( GPIOA, GPIO_PIN_0 ) == GPIO_PIN_RESET )
{
//PC13输出高电平
HAL_GPIO_WritePin( GPIOC, GPIO_PIN_13, GPIO_PIN_SET );
}
实现案例要求
我们之前的目标:配置 PC13 引脚为推挽输出模式,控制该引脚以一定的时间间隔切换高电平和低电平状态,让 PC13 引脚上的 LED 灯实现闪烁效果。
现在配置 PC13 引脚我们已经完成了,然后设置高低电平输出的功能函数 HAL_GPIO_WritePin 我们也知道怎么用了,那怎么实现 以一定的时间间隔切换引脚状态 呢?
可以通过工程自带的一个延时函数实现:HAL_Delay(ms)
/**
* @brief This function provides minimum delay (in milliseconds) based
* on variable incremented.
* @note In the default implementation , SysTick timer is the source of time base.
* It is used to generate interrupts at regular time intervals where uwTick
* is incremented.
* @note This function is declared as __weak to be overwritten in case of other
* implementations in user file.
* @param Delay specifies the delay time length, in milliseconds.
* @retval None
*/
__weak void HAL_Delay(uint32_t Delay)
{
uint32_t tickstart = HAL_GetTick();
uint32_t wait = Delay;
/* Add a freq to guarantee minimum wait */
if (wait < HAL_MAX_DELAY)
{
wait += (uint32_t)(uwTickFreq);
}
while((HAL_GetTick() - tickstart) < wait)
{
}
}
HAL_Delay(ms) 的作用就是延时指定的 ms 时间,比如延时 500ms,则写为 HAL_Delay(500);
现在我们已经万事俱备,开始实现目标功能。
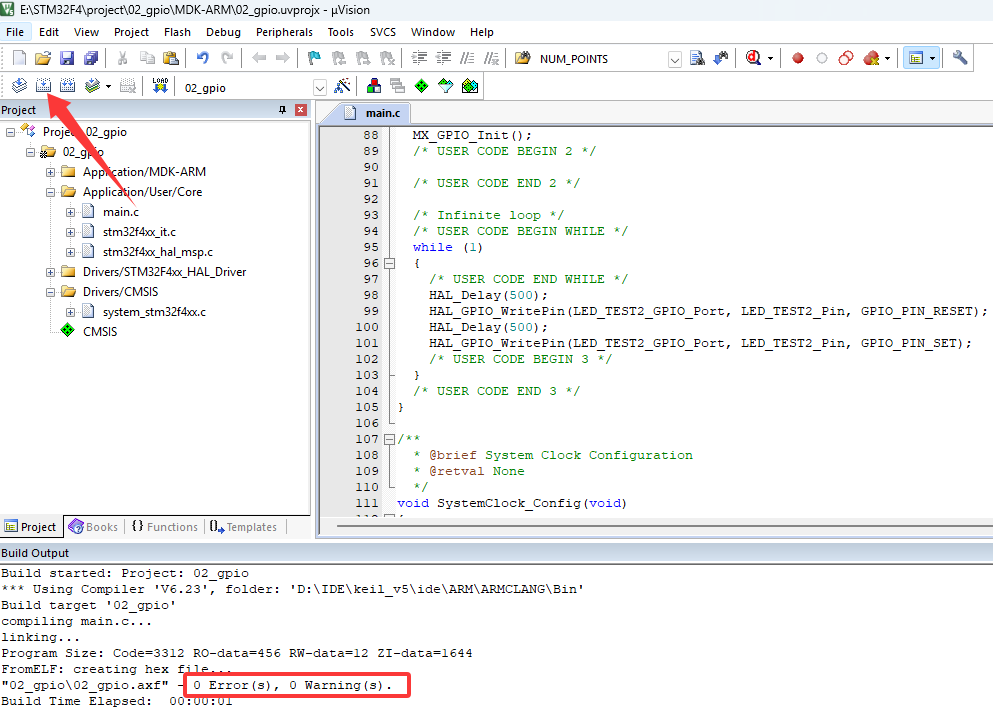
在我们工程的 main.c 文件中的 while 里加入以下代码:
HAL_Delay(500);
HAL_GPIO_WritePin(LED_TEST2_GPIO_Port, LED_TEST2_Pin, GPIO_PIN_RESET);
HAL_Delay(500);
HAL_GPIO_WritePin(LED_TEST2_GPIO_Port, LED_TEST2_Pin, GPIO_PIN_SET);
对我们的工程进行编译,如果没有问题则是输出 - 0 Error(s), 0 Warning(s).
 |
|---|
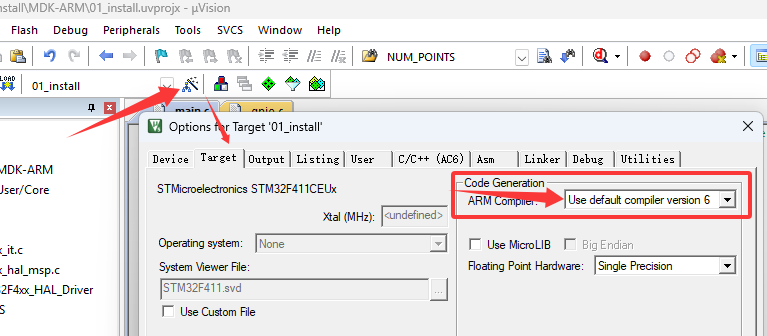
如果工程编译报错如下:
*** Target '02_gpio' uses ARM-Compiler 'Default Compiler Version 5' which is not available.
*** Please review the installed ARM Compiler Versions:
'Manage Project Items - Folders/Extensions' to manage ARM Compiler Versions.
'Options for Target - Target' to select an ARM Compiler Version for the target.
*** Build aborted.
Build Time Elapsed: 00:00:00
则需要设置 ARM 编译器使用 AC6 版本:
 |
|---|
完成后重新编译。
下载验证
硬件连接
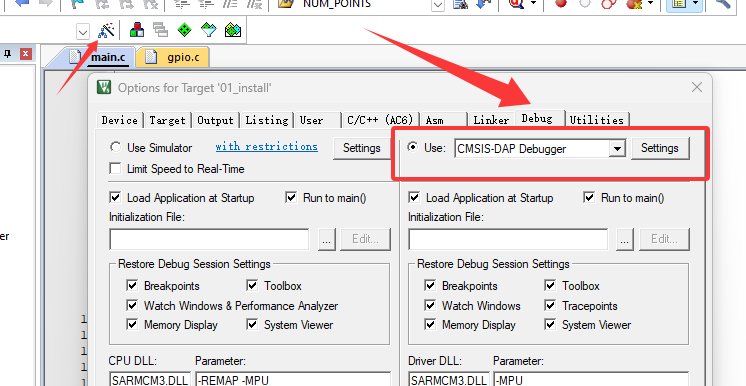
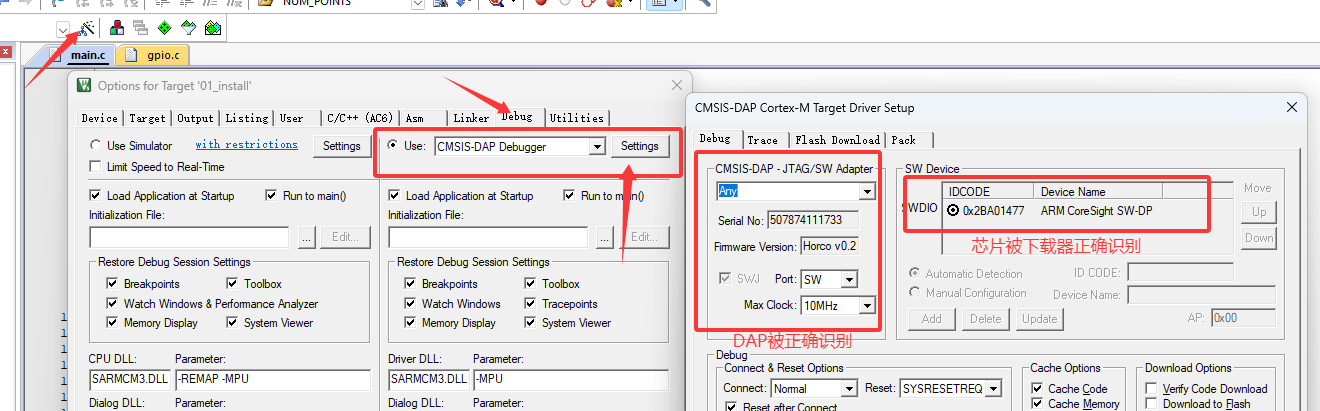
这里我使用的是 DAP-LINK,故在工程上配置为 CMSIS-DAP。
理论上 ST-LINK、J-LINK、DAP-LINK都可以对该项目的主控进行下载。
 |
|---|
我的下载器实物(点击展开)


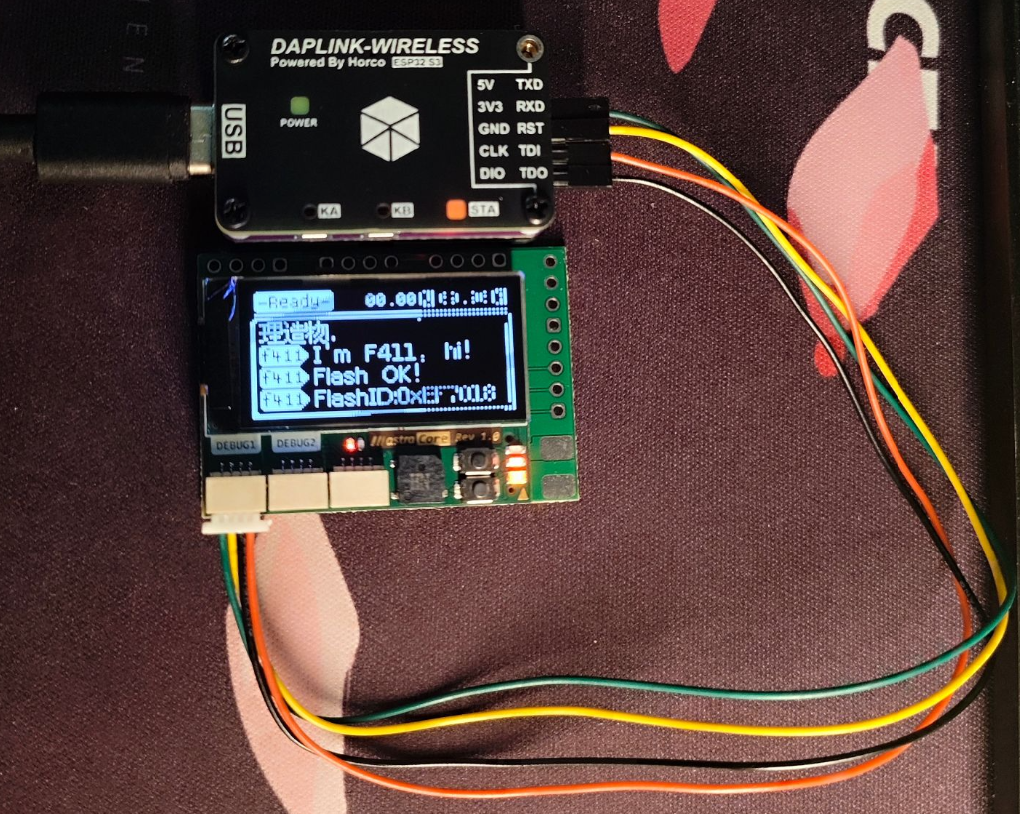
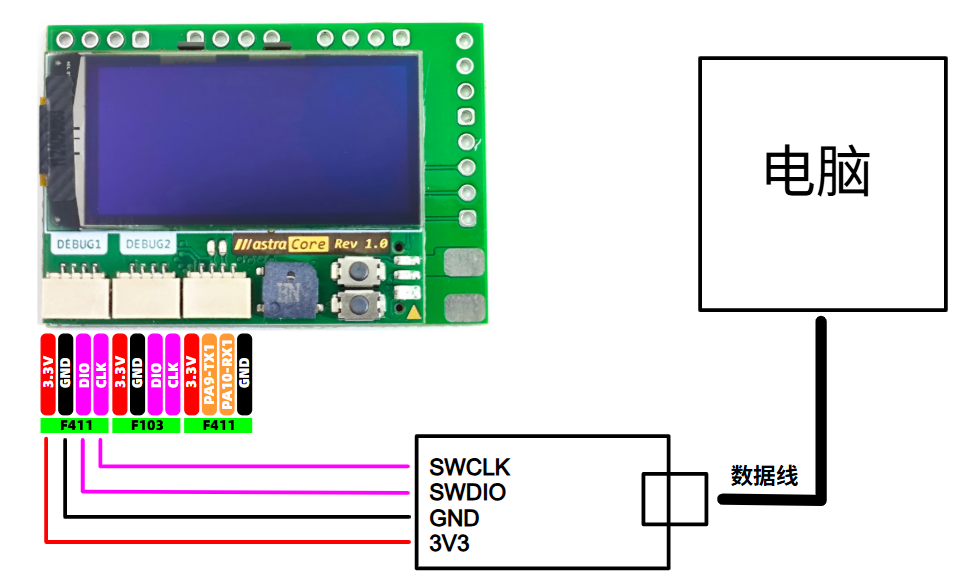
下载器与开发板的连接:
| DAP-LNK | 开发板 |
|---|---|
| GND | GND |
| 3V3 | 3V3 |
| SWDIO | SWDIO |
| SWCLK | SWCLK |
打开工程的debug设置选项,确认能够识别到下载器和芯片。
 |
|---|
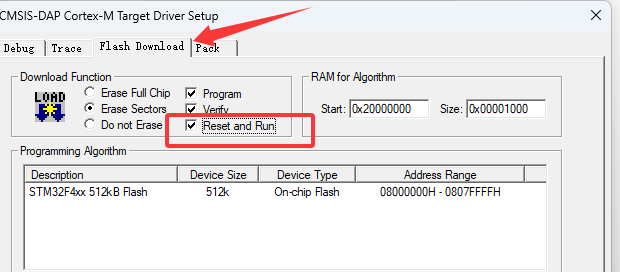
设置下载完成后自动复位。
 |
|---|
下载。
 |
|---|
效果验证
开发板右侧最上方 F411 的 LED 灯缓慢闪烁。
 |
|---|
本章例程下载
通过网盘分享的文件:02_gpio.zip
链接: https://pan.baidu.com/s/1CaTYreiV-Ih9NuyQGO7e0Q
提取码: LGGY